方案
By Technology
公司介绍
十一月 02, 2023
Share:

如今,车辆的复杂性正迅速增加,通过部署大量的传感器、处理器和执行器来提升功能、安全性和效率。随着汽车技术的发展,对车载网络系统的需求也与日俱增,需要更高的带宽和更低的延迟通信来确保功能和安全。
多年来,市场上已经制定了几种主要(或专门)用于车载网络的协议
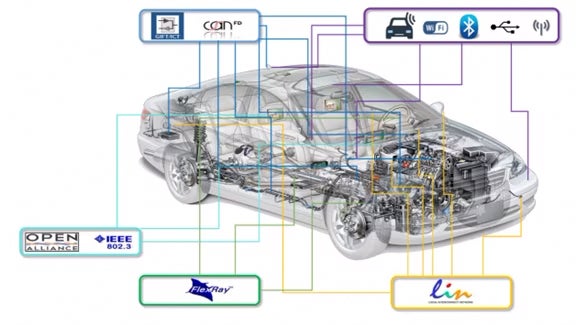
虽然每种协议都有独特的属性,但由于架构的不断变化和车载网络 (IVN) 内传输的大量数据,这些协议仍然难以满足当今汽车的需求。因此,汽车制造商正在寻找新的方案来提供必要的性能和带宽。
以太网曾是一种显而易见的选择,因为它在计算领域被广泛采用,带宽相对较高,成本合理。然而,它应用于汽车有一个显著的缺点,就是无法以时间敏感模式或确定性模式运行。这是由于以太网运行所固有的载波侦听多路访问/冲突检测 (CSMA/CD) 协议导致的。
为了使汽车行业能够利用以太网的优势,已经制定出一种新的协议。这种汽车专用协议版本被称为 10BASE-T1S,它用物理层冲突避免 (PLCA) 取代了 CSMA/CD,以实现对于线控驱动和先进驾驶辅助系统 (ADAS) 至关重要的确定性运行。
由于具备高带宽和低延迟的特性,汽车以太网越来越广泛地用于车载信息娱乐系统和 ADAS 系统。以太网对于实现诸如车辆到车辆 (V2V) 和车辆到基础设施 (V2I) 通信等连接功能发挥重要作用,这对提升安全管理至关重要。
随着车辆越来越依赖数据驱动,对更高带宽的需求也将不断增长,以支持自动驾驶、高清/4K 视频流和增强现实应用等先进功能。以太网网络必须提供更快的数据传输速率。未来的汽车以太网网络还应具备超低延迟,以实现自动驾驶的快速决策和响应。
对于汽车制造商来说,车辆内不同子系统的组织和互连是需要考虑的重要因素。通常,子系统按功能(例如,传动系统、底盘、舒适度)进行组织,而与它们在汽车中的位置无关。这会导致布线数量增多,从而增加车辆的成本和重量。
近来,首选方法是根据子系统在汽车中的位置将其“分区”。这导致了非相似功能的聚集,通常根据车内位置命名,例如“右前”、“左后”或类似的名称。分区架构兼具扩展性和灵活性,能够相对轻松地执行删除、添加或升级子系统等更改。它还允许部署冗余和容错元件,这对于实现关键系统所需的功能安全级别至关重要。
虽然分区架构的设计减少了对布线的需求,但也显著增加了车载网络骨干传输的数据量,需要更高的带宽、性能和低延迟。为实现自动紧急制动 (AEB) 等 ADAS 功能,传感器和控制电子器件遍布整个汽车,安全可靠的系统运行依赖于时间敏感网络 (TSN),以消除任何延迟差异。即使是依赖多个麦克风的车舱内降噪等系统,也需要时间敏感网络才能正确运行。
毫无疑问,确定性 (10BASE-T1S) 以太网将在未来车辆中发挥重要作用,特别是在分区架构的骨干网络方面。MOST 和 FlexRay 等协议不太可能在新设计中使用,但预计 LIN 和 CAN 将继续发挥作用,特别是在各个“分区”内。
此外,还将继续进一步制定其他协议,包括 MIPI 联盟的摄像头串行接口 2 (CSI-2) 和显示器串行接口 (DSI-2),这些协议对于当今汽车中 ADAS 和信息娱乐系统连接高分辨率摄像头、传感器和显示器至关重要。另外,MIPI 联盟和汽车 SerDes 联盟 (ASA) 正在开发标准化 SerDes 方案。作为此次合作的一部分,我们还在研究提高 MIPI 协议的安全性,并实现摄像头的非对称以太网,其中涉及以高带宽进行发送、以较低带宽进行接收。但最重要的架构变化是 CAN 将不再作为主要车辆通信骨干的默认协议,而是由以太网承担这一角色。
安森美 (onsemi) 深耕车载网络领域30余年,拥有广泛的产品组合,并提供值得信赖的客户支持和应用支持。我们的产品组合涵盖现有所有主流的车载网络技术,例如 LIN、CAN 和 FlexRay,同时我们继续提供不断增强的 IP 以更好地满足汽车行业的要求和需求。
随着 10BASE-T1S 以太网对汽车行业的重要性不断增加,我们会将大部分开发资源集中于此。继最近发布的方案之后,我们正在开发具有更高性能的第二代产品,以帮助行业持续推动分区架构和自动驾驶技术。
下载我们的白皮书,阅读了解更多内容:所有以太网到边缘:10BASE−T1S
ADAS和自动化系统使现代车辆实现半自动化,提高了安全性,减少了事故伤亡。每一代新车型的ADAS技术都会完成一次演进,使汽车的安全等级进一提高,并向着全自动驾驶的目标又一步迈近。
[read_more]
诸如自适应前照明、自动驾驶、停车辅助、环绕视图和后视摄像机、车道偏离警告、自动紧急制动、自适应巡航控制和自动防撞等系统正在成为主流。
这些系统广泛使用了图像传感器和激光雷达(LiDAR)探测器,持续对车辆的操作环境进行采样。控制系统中的机器视觉处理器将分析采样数据并通过算法决定是否采取必要的行动。
先进前照明系统结合了传感器、电动机和 LED 矩阵来调整光束的方向和强度。灯光将更加集中在需要的地方,照明距离更远,驾驶人员的能见度更高,同时灯光对道路上其他车辆和行人的干扰更小。
我们在ADAS市场上占据着重要的一席之地。除了我们高性能的图像传感器、LiDAR探测器和广泛的合作生态系统之外,我们还提供全面的产品组合,包含电源管理、照明解决方案、电机驱动器、专业系统设计知识、参考设计、强大灵活的开发工具包、以及经验丰富的应用支持团队。关键器件均符合 ISO-26262标准或支持ASIL。
Tags:
Min Su You
先进方案部高级市场经理