方案
By Technology
十二月 27, 2023
Share:

随着科技的日新月异,人类与机器人的互动将愈发频繁。从早晨在本地咖啡店里,协作机器人 (cobot) 为顾客精心冲泡咖啡,到在仓库中,自主移动机器人 (AMR) 自由穿梭各处拣选包裹。协作机器人可以在我们日常生活中的很多方面发挥作用。
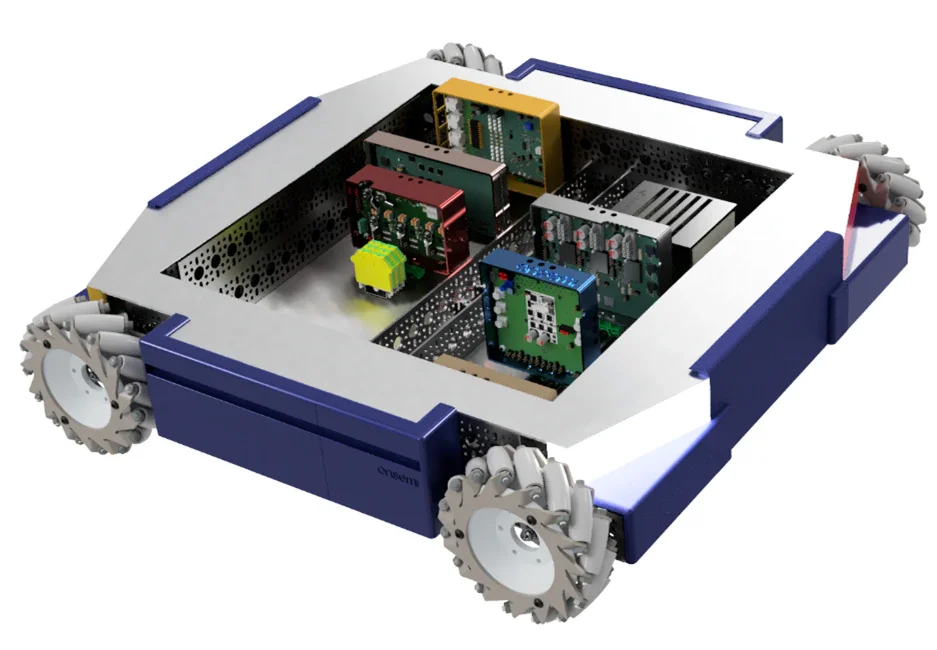
安森美 (onsemi) 开发了一款自主移动机器人演示,该演示由多个子系统方案构成,是一个使用安森美创新产品打造的完整的机器人设计。这个概念设计结合了安森美的各种不同感知和智能电源方案,可用于设计各种类型的机器人、协作机器人、电动工具和自动引导车。在本博客中,我们采访了负责安森美工业业务拓展和方案开发的 Theo Kersjes,以更深入地了解自主移动机器人的未来发展方向。
问题:
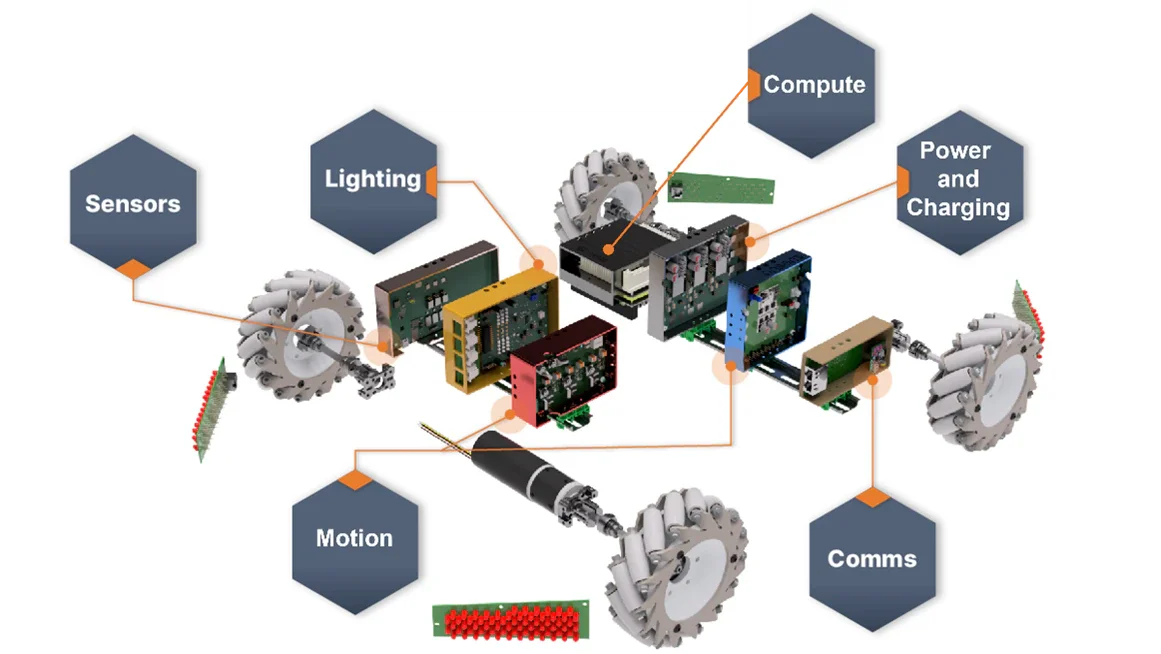
我们基于我们的产品制作了评估板 (EVB) 和开发平台。这些平台用于各种 AMR 子系统中,包括运动、传感器、电源、照明和通信。这些子系统与控制单元相结合,构成了一个自主移动的基础,它可以在其环境中导航并在需要时使用防碰撞功能安全地重新规划路径,以绕过障碍物。为了能够升级和使用我们最新的 EVB 并纳入一些客户产品(例如摄像头),该 AMR 使用 DIN 导轨来安装 EVB,并使用球头安装座 1/4-20 来安装传感器。每个子系统都包含了以下一些重要的安森美产品:
照明
照明子系统用于向周围的人传达 AMR 的状态、状况和意图。在智能零售库存应用中,照明还可以用于在昏暗的商店中照亮产品。照明子系统中使用了 NCV7685 线性电流驱动器和 NCL31000 智能 LED 驱动器,其中后者具备可见光通信和室内定位 EVB 功能。
运动
运动子系统中使用了安森美三相栅极驱动器 NCD83591、电源稳压器 NCP730 和用于 BLDC 电机驱动的最新 Trench 10 MOSFET NVMFWS0DxN04XM 方案。
传感器
传感器子系统中使用了图像传感器 AR0234和 AR1335以及 NCS32100角度电感式位置传感器和超声波传感器NCV75215。
电源
电源子系统中使用了 FAN65008B,该器件是一款集成功率 MOSFET 的 PWM 降压稳压器,可通过 48V 电池生成 AMR 所需的功率水平。FAN65008B 包含一系列保护电路,包括 OCP、TSD、OVP、UVP 和 SCP。电源子系统还包括电池监控、基于无桥图腾柱 NCP1681的超紧凑充电方案和电子保险丝NIS3071以及电流监控。
通信
通信子系统中使用了 NCN26010,该器件是一款符合 IEEE 802.3cg 标准的多分支以太网 10Base-T1S 收发器,其中包括 MAC、PLCA 和协调子层 (RS)。10Base-T1S 是 AMR 连接所有子系统的骨干。最后,控制单元使用了 NVIDIA® Jetson™。这提供了一个很好的集成示例,说明了如何在机器人操作系统 (ROS) 中以 Docker 容器形式实现各种安森美子系统。
2. 能否介绍一下该自主移动机器人中添加了哪些安森美产品以及它们的功能是什么?
如前所述,我们使用了 DIN 导轨来构建安森美 AMR,以便能够添加新的产品与功能。明年,我们将重点关注传感器融合这一主题。此外,安全性始终是我们关注的重点,我们将通过使用安森美的新型电子保险丝产品 e-Fuse NIS3071 来扩展电源子系统。
3. 您认为设计人员在打造机器人时面临哪些挑战?安森美的子系统方案如何通过更简单的集成来应对这些挑战?
对我来说,这是其中一个最重要的问题。例如,我们会与一些公司合作,将安森美图像传感器和 LiDAR 技术集成到他们的摄像头系统中,从而将图像感知和深度感知融合到一个系统中。我们会思考如何更好地为他们提供支持,了解并识别还没有集成到我们产品之中、未来可能导入我们产品的算法或功能。
对机器人设计人员来说也是如此。通过构建安森美 AMR,我们得以深入探索 ROS(机器人操作系统)环境在 Nvidia Jetson 上的运行方式及其对驱动程序的需求。此外,我们还得以研究 Nvidia Omniverse™ 和 Isaac Sim™(机器人仿真与合成数据平台)。仿真环境在打造安全的 AMR 设计中发挥了关键作用。仿真环境用于训练移动机器人处理合成数据,安全导航以绕过障碍物。这些仿真环境用于寻找最节能的路径,延长电池充电周期,或者利用机会进行充电,从而突显安森美的高能效电源和智能感知用于 AMR 子系统中的优势。
4.机器人市场正在迅速发展,您认为在未来五年内机器人技术会有哪些发展?您认为会取得哪些进步?
那时,AMR 已经不需要训练轮,甚至更好的是,由于它们安全且高效,因此对AMR来说已经不存在物理障碍了,AMR 可以在人群中自由移动。环境仍然是受控的,比如照明受控且地面平整的仓库和/或办公室环境。AMR 将能够适应任何环境,就像人一样。此外,真正的部署灵活性是一个关键特性。这需要一个接口来指导或训练机器人做事情,而不需要编程。NLP(自然语言处理)、智能高效的硬件传感器以及电源和控制方面的进步将被整合到 AMR 中,以执行一般任务。机器人可以一会儿操作数控机床,一会儿包装产品。或在农业环境中,AMR 可以一会儿除草,一会儿采摘成熟的蔬菜,然后将其包装好以便装运。
5.您最喜欢 AMR 的哪些功能?在设计过程中,有没有发生什么有趣的故事?可以分享一下吗?
在打造安森美 AMR 的过程中发生了很多事情,其中有一次,我们偶然把万向轮装错了,结果导致移动机器人在实际应用中的驾驶行为非常滑稽,而在仿真环境中,车轮的安装位置是正确的,行为也很正常。还有一次,我们将电机绕组连接线暴露在外,并与铝材接触,导致产生了反电动势(受影响的车轮无法转动),一名工程师拆下了车轮轴承,但仍不明白车轮为何无法转动。这个问题后来成为了新工程师加入团队时学习 EMF 的一个有趣案例。在安森美,许多不同的工程师都参与了子系统的设计工作。大家都很高兴能将这些系统集成到一个自主移动机器人中。
随着机器人技术在我们的日常生活中变得更加高效和可靠,安森美将继续开发可以集成到 AMR 的技术。运动、传感器、电源、照明和通信子系统是自主移动机器人的构建模块。有关每个子系统的更多详细信息,请联系安森美支持中心。
访问我们的自主移动机器人方案页面
其他资源:
___
关于 Theo Kersjes

Theo 拥有超过 25 年的半导体行业国际经验,涉足产品管理、营销和应用方面。目前,他负责安森美先进方案部工业业务拓展和方案开发,并领导一支由产品定义工程师和应用工程师组成的团队,专注于电源和感知方案。
他的职业生涯始于数字视频和信号处理应用,后来他从荷兰搬到了美国圣何塞湾区,投身于宽带接入、无线连接和数字电源方案的开发工作。在一家初创公司任职期间,他成功开发了独特的 60Ghz 无线连接产品,并设计了工业海洋 ROV方案。Theo 在安森美打造了自主移动机器人技术演示系统,该系统采用了 BLDC 电机控制、图像传感器、LED 照明驱动器、电源转换和连接方案等产品开发平台。
Tags:
安森美